Python Matplotlib macOS backend
Matplotlib is a nice Matlab-like environment for Python. If you encounter a backend related problem while using Matplotlib [1] on a Python Virtualenv [2], then you need to explicitly select one (i.e. backend : Qt5Agg) in a ~/.config/matplotlib/matplotlibrc (or directly in a matplotlib file located in current working directory) configuration file. Then remember to use modern interpreter and meet dependencies requirements. Example below:
$ mkdir ~/.matplotlib $ echo "backend : Qt5Agg" >> ~/.config/matplotlib/matplotlibrc $ echo "backend : Qt5Agg" >> matplotlibrc $ python3.6 -m venv venv-mac-36 $ source venv-mac-36/bin/activate $ which python $ pip install matplotlib pyqt5
Now you can use Matplotlib inside created Python Virtualenv (assuming you had Python 3.6 and Qt5 [3] already installed on your system). Other backends are: TKAgg, GTKAgg, Qt4Agg, Qt5Agg, WXAgg [4].
[1] https://matplotlib.org/
[2] https://www.python.org/
[3] https://www.qt.io/
[4] https://matplotlib.org/faq/usage_faq.html
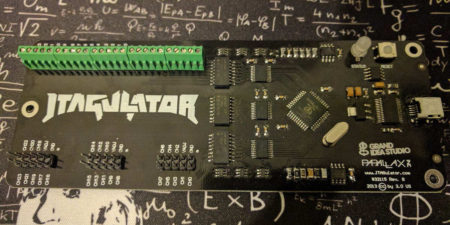
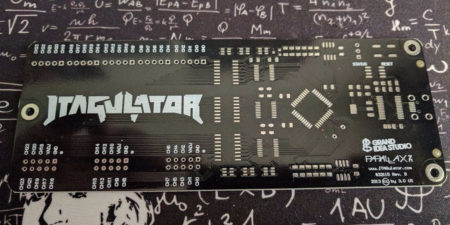
JTAGulator
I just did a self-assembly of JTAGulator. This simple and amazing device indeed works and shortens JTAG pinout search from days to seconds. AMAZING! I have some spare devices to sale cheap in EU, if you want one let me know! :-)
JTAGulator is an open source hardware tool, created by Joe Grand / Grand Idea Studio, that assists in identifying OCD connections from test points, vias, or component pads on a target device. All you need is a target device, bunch of tap wires / cables, USB-Mini cable, and serial terminal to operate JTAGulator.
On-chip debug (OCD) interfaces can provide chip-level control of a target device and are a primary vector used by engineers, researchers, and hackers to extract program code or data, modify memory contents, or affect device operation on-the-fly. Depending on the complexity of the target device, manually locating available OCD connections can be a difficult and time consuming task, sometimes requiring physical destruction or modification of the device.
LibSWD-0.7 RELEASE
It is my great pleasure to inform you folks that, almost after four years, I did a new release of LibSWD-0.7 [1], a low-level embedded systems access open framework. Special thanks goes to Andrew Parlane of Carallon Ltd [2] for his much appreciated contributions! Well now I feel like I need to invent some nice small device based on ARM Cortex-M0 CPU :-)
[1] https://github.com/cederom/LibSWD
[2] http://www.carallon.com/
PIP and Python Modules inside Blender
If you want to install additional Python [1] modules inside your Blender [2] environment, you can install PIP using this recommended script [3], then use PIP to install all modules that you want. Note Blender’s Python Virtualenv location is /path_to_blender/blender_version/python/bin/python and you need to use this particular interpreter to launch the script.
[1] https://www.python.org/
[2] https://www.blender.org/
[3] https://pip.pypa.io/en/stable/installing/
Is Blend4Web a Blender Game Engine replacement?
You just need to see this awsome Mars Curiosity [1] simuluator [2] made by NASAJPL [3] with Blender3D [4] Blend4Web [5] HTML5 [6] WebGL [7] Free and Open-Source Software :-)

[1] https://www.nasa.gov/mission_pages/msl
[2] https://eyes.nasa.gov/curiosity
[3] http://www.jpl.nasa.gov
[4] https://www.blender.org
[5] https://www.blend4web.com
[6] https://www.w3.org/TR/html5
[7] https://www.khronos.org/webgl
Telemedycyna i eZdrowie 2016
It is my pleasure to be part of organizing committee and scientific board of this cyclic international conference on Telemedicine and eHealth arranged by Polish Telemedicine and eHealth Society. You can click image below to see the full conference program.


Google Android Nexus Device Un-Brick

If you happen to brick your Google Nexus device you can always use stock ROM images [1] to revert it to a default and operational state. Package contains not only OS but also bootloader and radio firmware images!
I have bricked my device by installing custom firmware that messed partitions layout inside a Flash Memory. I have seen lots of people having similar problem of endless bootloader-loop. There is no need to send a device to a service when bootloader is operational. All you need is a stock firmware image from Google [1], USB cable, and fastboot utility from Android SDK. If you happen to damage a bootloader, then hardware manipulation at low-level is necessary over JTAG, I can help to recover your device in that case.. no worries :-)
Telemedicine and eHealth 2015
It was great fun and pleasure to take part in Telemedicine and eHealth 2015 conference organized by Polish Telemedicine and eHealth Society.
As a member of organizing committee I managed technical/IT part of the conference. After the conference, during the general meeting, I have been re-selected as a Society Board Member.
HackRF(One) on FreeBSD
My port of HackRF has been committed. Enjoy your HackRF One SDR on FreeBSD OS! =)
CeDeROM BCI at Bio-Tech 2013
Today I had a pleasure to give a lecture on my “CeDeROM Brain Computer Interface” at Bio-Tech 2013 scientific conference hosted by Lublin University of Technology. Thank you for this great opportunity and so many interesting people!
II Conference on Aerospace Robotics (CARO’2)
Today, with my friend Grzegorz Misiołek, we have presented a lecture on our early stage research “BioCybernetic Robot with Brain Computer Interface Technology for Space Applications” at II Conference on Aerospace Robotics (CARO’2) hosted by Polish Space Research Center of Polish Academy of Sciences. Thank you for this great opportunity!
OpenOCD and LibSWD integration complete
Patches that integrate LibSWD with OpenOCD has been already sent, so the platform independent Serial Wire Debug in Open-Source becomes a reality! Mr. Gerrit takes care of the source code review part, while Mr. Jenkins takes care of proper binary build for various platforms and operating systems. This is the right moment to make use of developers mailing list for feedback, asking questions, blaming, testing, adding new features and voting to accept the patches, so the code becomes an integral part of the OpenOCD release! ![]()
Orange Labs provided R&D environment for initial stages of the research. Warsaw University of Technology made this possible as part of my MSc and PhD thesis. Krzysztof Kajstura designed and provided his generic KT-LINK (FT2232H based) interface to work with. David Brownell first introduced the Transport layer in OpenOCD in 2010 to split Target from JTAG. Simon Qian was working in parallel on his own SWD implementation for a Versaloon interface (as part of intelligent firmware). Øyvind Harboe, Peter Stuge, Spencer Oliver, Rodrigo Rosa helped me on GIT usage and OpenOCD internals, Freddie Chopin helped me a lot with commited patches to match OpenOCD coding standards, Akos Vandra helped me to test functionality as the program was created… and my other friends should be also noted here for their support :-)
Power of the few outweights power of the many! Thank you for your support! :-)
LibSWD on FedCSIS 2012
“LibSWD serial wire debug open framework for low-level embedded systems access” has been presented on FedCSIS 2012 international conference and the paper has been already published by IEEE Xplore Digital Library.
All my publications are listed on Google Scholar.
CeDeROM BCI on ITiB 2012
“CeDeROM Brain Computer Interface” has been presented on ITiB 2012 conference and the paper has already been published by Springer Link.
All my publications are listed on Google Scholar.
PhD started
I have started a PhD studies on Biocybernetics with Neural Interfacing as my field of research. Cyberspace here I come! :-)
MSc Level Complete :-)
I have finished the MSc level of the scientific career with my “CeDeROM Brain Computer Interface” design, at last, but still lots of work ahead! Credits goes to everyone who earned it – Thank You for Your Support! :-)


OpenOCD on FreeBSD
My port of OpenOCD has just been committed. Enjoy Open On-Chip-Debugger on FreeBSD! =)